
HD Map이 무엇인가요?
운전자가 운전을 직접 하지 않더라도 자동차가 알아서 운전이 가능한 레벨 4 고도 자율주행에서는 센티미터급의 정밀한 정밀 측위 기술이 필요하다.
이러한 고정밀 측위를 위해 필요한 한 것이 바로 HD Map이다.
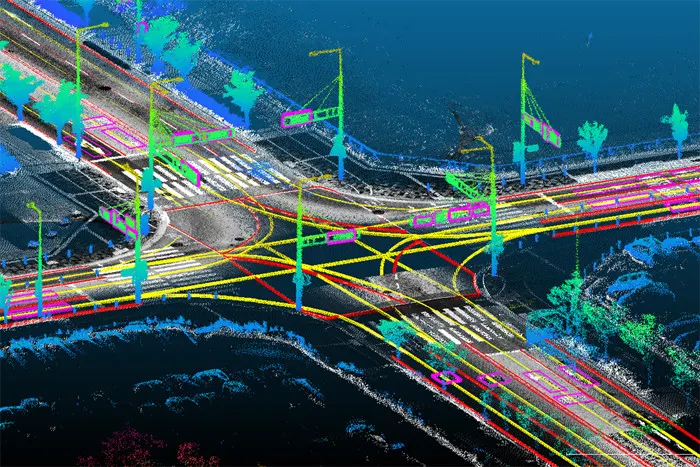

HD Map은 차선정보, 가드레일, 도로 곡률, 경사, 신호등과 표지판 위치 등의 3차원 도로 환경 정보를 제공합니다.
이러한 정밀 지도를 만들기 위해서는 MMS (Mobile Mapping System) 장비를 갗춘 특수 목적의 차량이 필요한데, MMS 장비는 고정밀 GPS, INS, 360도 카메라, 3차원 레이저 스캐너 등등의 장비들로 이루어져 있다. MMS 장비 탑재 차량은 지도가 필요한 지역을 돌며 필요한 데이터 (도로 위치, 환경 데이터) 을 추출하며, 후처리 작업을 통해 정보를 추출한다.
이렇게 hd map을 만들면 클라우드 서버에 저장하고 자율 주행 차량은 무선통신을 통해 인접 지역의 정밀지도를 다운로드 하게 된다.
hd map의 경우 static한 정보만 담고 있지만, 실제 자율주행을 위해서는 dynamic 정보도 제공해야 한다. 이러한 dynamic object를 반영하는 국제 표준규격이 바로 LDM (Local Dynamic Map)이다. 이 것은 주행경로 상에서 서비스 지역 안의 지형정보, 위치정보, 상태정보를 제공하는 데이터 저장소 역할을 한다.

이러한 정밀지도의 정보를 항상 최신상태로 유지하는 것은 어렵다.
공사 상황이 생기거나 사고가 생길 수도 있고, 노후화 되는 상황 또한 존재한다. 측량 차량이 정기적으로 데이터를 수집하고 후처리 작업까지 진행해야 하기 때문에, 데이터의 양이 어마어마하고 최신상태 유지가 힘들다. 이에 대한 대안으로 이미 운행되고 있는 차량에 장착된 ADAS 센서에서 수집한 정보를 클라우드에서 모아서 map을 형성하는 방법 또한 존재한다.
자율주행을 위한 위치 추정
앞서 만든 센티미터 급의 정밀지도를 이용하기 위해서는 자율주행 차량의 위치 추정 기술도 센티미터급의 정밀도를 가져야 한다. 이러한 위치 추정 방법에는 크게 두가지가 존재한다.
차량 내부 이동정보 측정 (Dead Reckoning)
IMU와 Odometry를 활용하는 Dead Reckoning 방법이다. 3차원 가속도계와 회전 속도계, 운전대 각도, 주행거리 센서 정보를 활용하여 시작점을 기준으로 하여 움직인 거리와 방향을 찾아내는 방식이다. 이러한 방법은 센서 측정값에 굉장히 의존적이며, 센서에 약간의 오차가 존재해도 시간이 지남에 따라 오차가 누적된다.
지도에 표시된 특징점 측정 (Feature Detect)
카메라, 라이다 등의 센서를 이용해 차선, 표지판, 건물 등 고정적인 요소들에서 도로 위 특징점을 검출하여 정밀 지도상의 정보와 비교하여 위치를 추정하는 방법이다. 이러한 방식은 누적 오차는 발생하지 않지만, 특징점이 존재하거나 지도 상에 존재하는 지역에 대해서만 사용할 수 있다.
정밀 측위 기술을 위한 기업들의 노력
•
다임러, BMW, 아우디 → 자차 센서 데이터와의 융합을 통한 도심지 측위 기술 개발 중
•
톰톰 → 클라우드 지도 기반 측위 개발 중 (측위 음영 지역의 오차 보정)
•
테슬라 → 전방, 측, 후방 영상만을 이용해 인지와 측위 시스템 적용
•
모빌아이 → SoC 칩이 장착된 차량을 활용해 데이터 크라우드 소싱 정밀지도 구축 중
•
현대오토에버 → 지도 자동 구축 기술 MAC를 개발해 데이터 자동 처리 중
•
42dot → 저가 GNSS/IMU, 카메라를 이용한 기하정보 기반 영상 SLAM 기술 개발 중, 실제 도심환경의 좋지 않은 조건에서도 강건한 측위 기술 개발 중
•
네이버랩스 → 라이다, 카메라, IMU, Wheel Encoder 등의 다양한 센서와 정밀지도를 결합한 측위 기술 개발 중, 실내,실외 등등 음영 없는 정밀측위기술 개발 중
고도 자율 주행 기술 상용화하기 위해서는 입체 도로, 도심지 등 GPS가 동작하지 않거나 음영이 생기는 지역이나 기상 상황, 장애물 때문에 특징점 검출이 불가한 조건에서도 안정적으로 측위하기 위한 기술이 필요하다.
이 포스트는 기석철 교수님의 글을 참조해 만들었습니다.


