

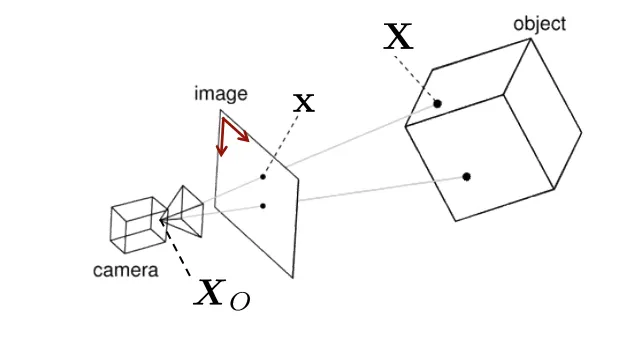
저번 포스트에 다루었던 것은 world coordinate 에서 pixel coordinate 까지의 변환과정이었다.
x → pixel coordinate / P → transformation / X → world coordinate
이제 변환 행렬 의 파라미터들을 구하기 위해 어떠한 연산 과정을 거쳐야 할지 살펴보자.
Mapping 과정
•
Direct Linear Transformation은 어떤 오브젝트의 점 가 이미지 점 로 매핑하는 것이다.
•
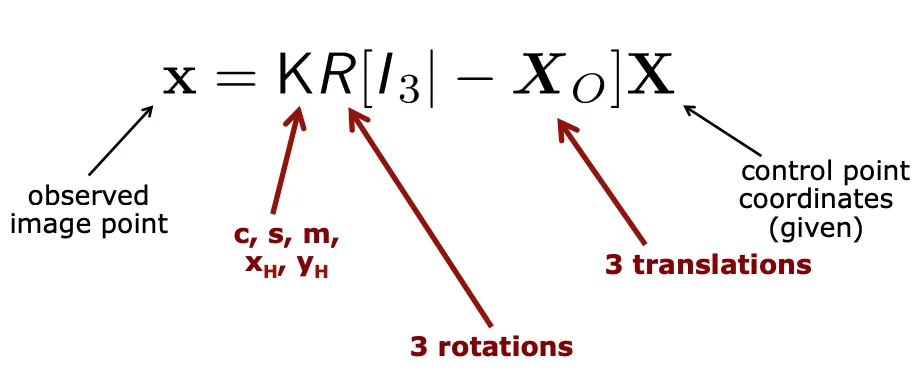
총 11개의 intrinsic 과 extrinsic parameter를 구해야한다.
•
Intrinsic의 경우 카매라 내부의 파라미터로써, 행렬 로 주어진다.
•
Extrinsic의 경우 카메라의 위치와 방향을 나타내므로, 행렬 와 행렬 의 조합으로 표현된다.
파라미터를 구하려면 몇 개의 Points가 필요할까?
11개의 미지수가 존재하고 affine camera를 모델링한다고 가정한다면, 적어도 6개의 점이 필요하다!
(하나의 point가 두 개의 관찰값(x,y)을 주기 때문이다....) → DLT
그러나 만약 Calibrated Camera 인 경우 → Intrinsic parameter를 알고 있다!
6개의 미지수만 구하면 되고 적어도 3개의 점만 있으면 된다. → P3P
DLT 과정
목표 : 행렬 의 11개의 파라미터 구하기
주어진 것 :
(1) 점의 개수 을 만족하는 오브젝트의 점 (in 3D coordinates)의 집합
(2) 를 만족하는 이미지 좌표계에서의 점들의 집합
쉽게 말해 실제 위치상의 점과 이미지 상의 대응하는 점을 알고 있다는 이야기다.
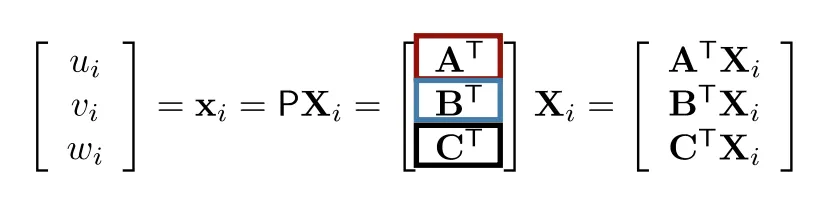
[1단계] 행렬 M 만들기
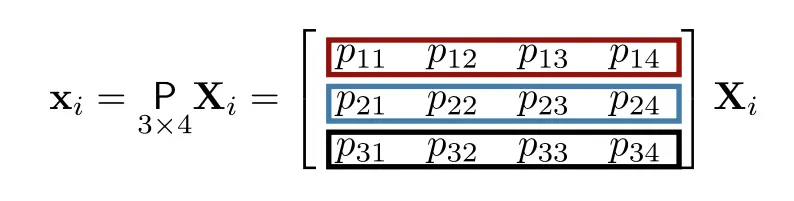
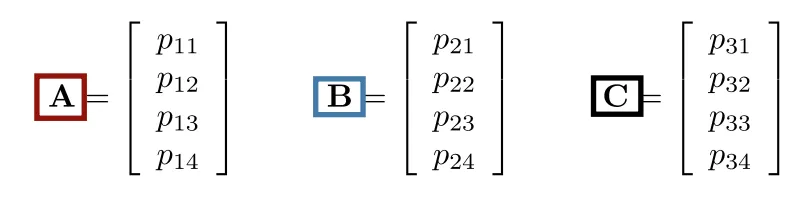
위와 같이 행렬 A,B,C를 만들게 되면 아래와 같이 주어진다.
위에 제시된 식을 다시 표현하면 방정식의 형태로 표현하면
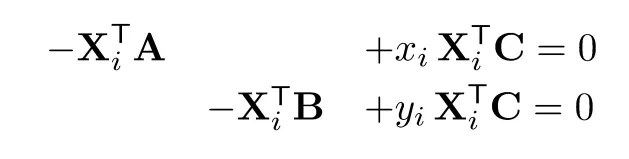
우리가 구하고자 하는 행렬 P의 원소들을 ( 형태로 만든 column-vector를 만든다 (구하고자 하는 해)
앞서 제시했던 식을 해를 구하는 형태로 만들기 위해 변형하면,
아래와 같이 우리가 흔히 보던 Linear system으로 치환 가능하고 이제 이문제는 아래 식을 만족하는 해를 구하는 문제로 바뀌게 된다.
[2단계] SVD를 이용하여 행렬 P 구하기
•
의 꼴의 linear equation의 해를 구하는 것은 행렬 의 null space를 찾는 것과 같다.
•
를 풀기 위해 SVD를 사용한다
•
singular value 값 0에 해당하는 가장 작은 singular vector가 가 된다
정확하지 않은 관측값이 존재하는 경우가 있기 때문에, 오차를 가장 작게 하는 행렬 를 찾아야 한다.
SVD를 이용하면 아래와 같이 분해할 수 있으며,
이 때 가장 작은 singular value에 해당하는 singular vector를 로 풀면 된다.
[3단계] 행렬 P를 분해하여 각 파라미터들 구하기
•
어떻게 행렬 를 가지고 를 구할 것 인가?
행렬 는 아래와 같은 형태로 나눠서 표현할 수 있다.
공통된 부분을 통해 우린 간단히 Projection Center 를 구할 수 있다.
그렇다면 은 어떻게 구할 것인가??
일단 구하기전 각 행렬들의 특징을 살펴보는 것이 중요한데
•
행렬 는 triangular matrix 의 형태를 가진다.
•
행렬 은 roatation matrix 이다. 의 성질을 가진다.
위의 성질들을 잘 살펴보면 QR decomposition을 통해 각 파라미터를 구할 수 있을 거라는 생각이 든다.
왼쪽이 Q, 오른쪽이 R의 형태를 띈다.
위와 같이 구하게 되면 양수의 diagonal elements를 얻게 되는데, 만약 음수 값을 얻고 싶다면
아래와 같이 구하면 된다.
앞서 제시한 행렬 은 homogenous 한 상태이기 때문에, 다시 normalize 해주는 과정이 필요하다.
