Linear Equation
linear equation은 변수 이 아래와 같은 형태로 작성될 수 있는 방정식이다.
와 계수 은 실수 혹은 복소수이고 위의 방정식은 다음과 같이 작성된다,
Linear System
변수 을 포함하여 하나 이상의 linear equations를 모은 집합이다
Identity Matrix
Identity matrix는 square matrix이고 diagonal entries가 모두 1인 행렬이다.
그리고 그 부분을 제외한 나머지가 0이다.
이러한 Identity matrix는 어떤 임의의 벡터 에 행렬 을 곱하면 자기 자신이 도출된다.
Inverse Matrix
임의의 square matrix 의 inverse matrix 는 아래 식을 만족한다.
matrix 에 대한 역행렬 은 아래와 같이 정의된다.
Linear System을 Inverse Matrix를 이용해 풀이하기
앞서 제시한 Linear System 는 다음과 같은 과정을 통해 풀이가 가능하다
만약 matrix 가 invertible 하지 않다면, 의 값이 0이되고, 해가 무수히 많거나 해가 없는 경우가 된다.
Linear Combination
vectors 이 주어지고 scalars 가 주어질 때,
가중치 계수를 로 하면서 의 Linear Combination이라고 한다.
weights는 0을 포함한 어떠한 실수값도 가질수 있다.
Vector Equation Form
첫번째 형태가 Matrix Equation이고, 두번째 형태가 Vector Equation의 형태이다. 이러한 형태로 변형하는 이유는 Linear Equation이 해를 가지는 지를 판별하기에 용이하기 때문이다. 이 때 판별하는데 사용되는 개념이 밑에 제시할 Span이다.
Span
vectors 이 주어지고, 은 모든 의 Linear Combination의 집합으로 정의한다.
이 때 scalars 는 임의의 값이다.
subset of spanned by 라고 부르기도 한다.
기하학적으로 Span을 묘사하면 다음과 같다.
은 상의 평면으로 묘사할 수 있다. ( 모두 포함한다)
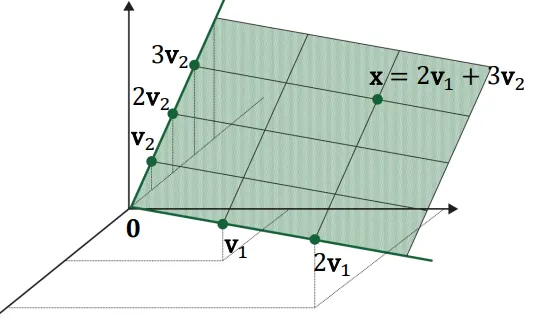
의 식에서.
해가 존재하기 위해서는 을 만족해야한다.
(얻고자 하는 해가 저 평면위에 존재해아 한다는 뜻!)
해가 존재하는지는 확인할 수 있었다. 그런데 해가 유일한지 무수히 많은지는 다시 확인해봐야한다. 아래 개념들을 통해서.
Linear Independence
실용적인 정의
vectors 이 주어졌을 때,
가 그 전의 vectors 의 Linear Combination의 형태로 표현되는지 확인한다.
만약 가 Linear Combination으로 표현이 된다면 linearly dependent이고,
그렇지 않다면 linearly Independent한 것이다.
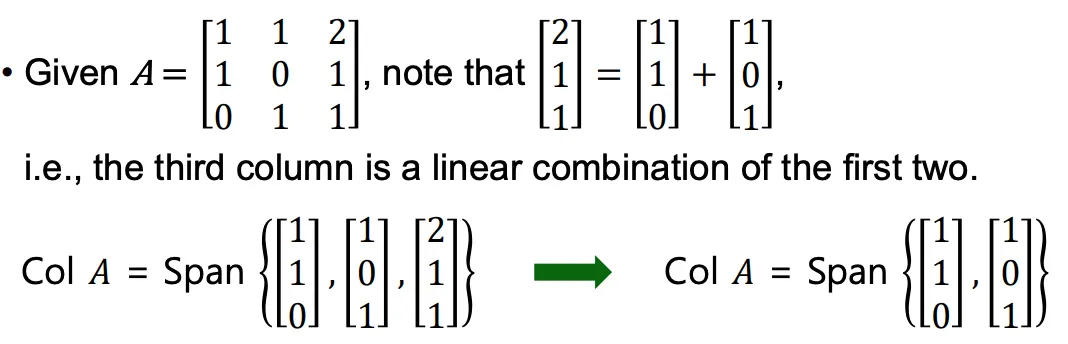
Linear Dependence
행렬 의 column vectors들 이 linearly dependent한 경우 Span을 늘리지 않게된다.
vector 는 를 linear combination하여 표현할 수 있기 때문에
의 조합은 사실상 의 조합과 같기 때문에 span을 늘리지 않는다.
Uniqueness of Solution for
앞서 제시한 식을 다시보면 가 모두 linearly independent 할 때 유일한 해를 가지며
만약 linearly dependent하다면 해는 무수히 많게 된다.
Subspace
subspace 는 의 linear combination에 대해 닫혀 있는 부분집합으로 정의된다.
•
어떠한 두 벡터 와 임의의 스칼라 값 가 주어질 때,
를 만족한다.
•
subspace는 항상 의 꼴로 나타내어 진다.
Basis (of subspace)
subspace 의 basis는 아래 조건을 만족하는 벡터의 집합이다.
•
주어진 subspace 를 완전히 span해야 한다.
•
중복 없이 Linearly independent하다.
•
basis는 한 개가 아니며 수 많은 basis를 만들 수 있다. → not unique

Dimension (of subspace)
그렇다면 subspace 가 주어지면 어떤 것이 unique 하다고 말할 수 있을까?
바로 를 구성하는 basis의 개수는 항상 유일하다! 이 것이 바로 dimension의 정의이다.
Column Space of Matrix
행렬 의 column space는 의 column들로 spanned된 subspace를 의미한다.
이러한 것을 라고 부른다.
Rank
행렬 의 rank는 행렬 의 column space의 dimension을 의미한다.
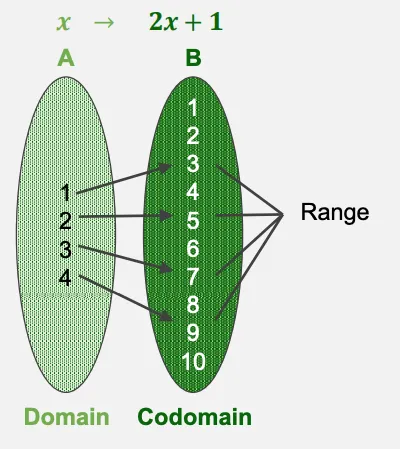
Transformation
transformation(혹은 function, mapping) 는 입력 를 출력 로 매핑하는 것을 의미한다.
•
domain : 입력 의 가능한 모든 값의 집합
•
co-domain : 출력 의 가능한 모든 값의 집합
•
image : 입력 가 주어졌을 때, 매핑되어 나오는 출력
•
range : domain 내에 존재하는 각 입력들의 출력 값의 집합
•
임의의 입력 에 대응하는 출력은 오직 하나이다.
Linear Transformation
transformation 이 linear하기 위해서는 아래 조건을 만족해야한다.
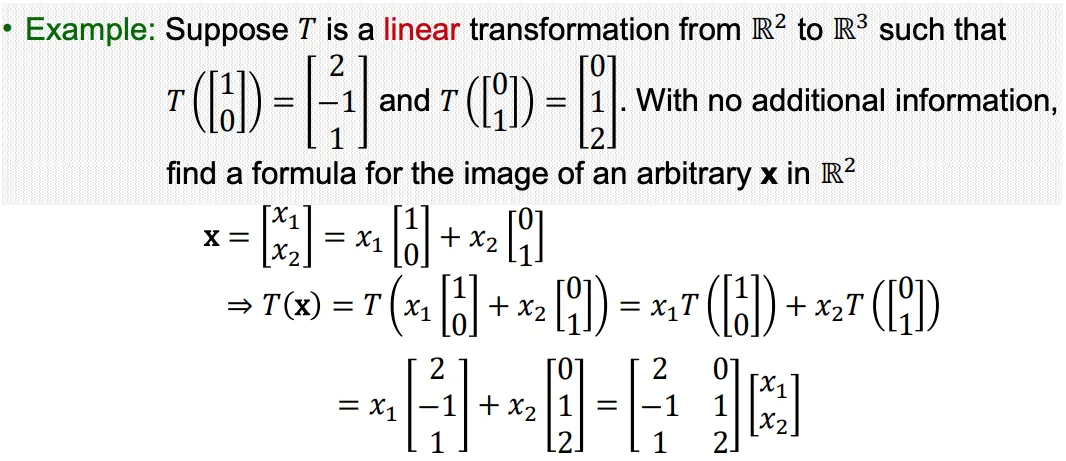
일반적으로, 를 linear transformation 이라고 가정한다면,
는 항상 matrix-vector multiplication 형태로 나타내어 진다.
행렬 의 번째 column은 벡터 와 같으며,
는 ldentity Matrix의 번째 column이라고 한다.
행렬 를 linear transformation 의 standard matrix 라고 부른다.
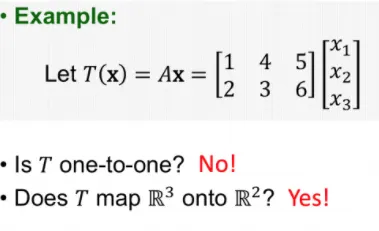
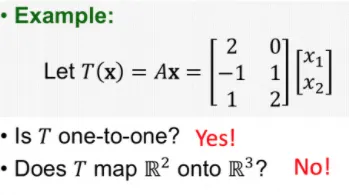
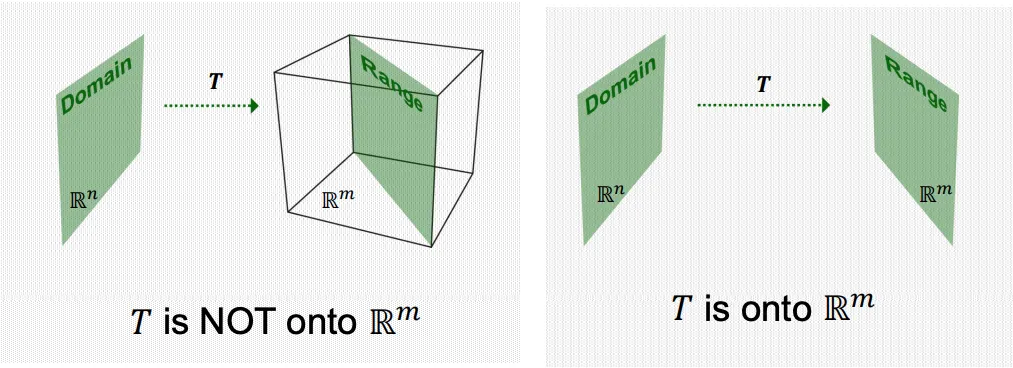
Onto
매핑 을 가정했을 때, 중 적어도 하나에 대한 image가 에 존재할 때
즉, range 가 co-domain 과 동일할 때 (치역 = 공역) onto라고 정의한다.
일반적으로 입력 차원 이 출력 차원 보다 크다면, onto 를 만족할 가능성이 높다, 하지만 반대의 경우 절대 onto를 만족할 수가 없다.
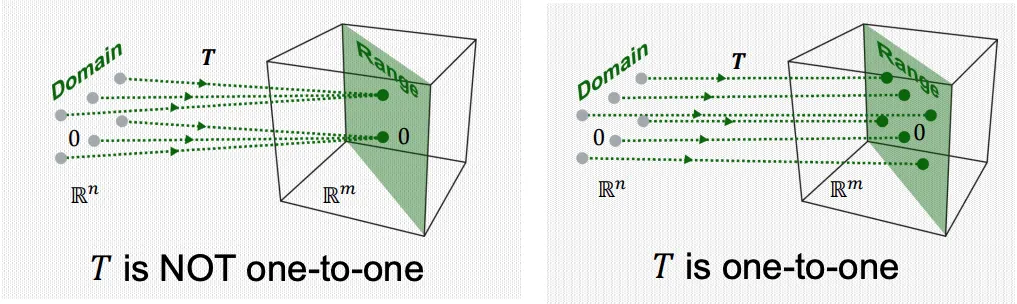
One to One
매핑 을 가정했을 때, image 에 대응하는 이 반드시 하나일 때
one-to-one 이라고 가정한다.
즉, range 안의 각각의 출력 벡터가 반드시 오직 하나의 입력 벡터로부터 매핑 되어야 한다는 것이다.
정리하면,
매핑 을 linear transformation으로 가정하면, 아래 식을 만족하게 되고
행렬 의 column vector들이 linearly independent 하다면 one-to-one 하다.
행렬 의 column vector들의 span이 이라면 onto이다.