
RQt가 무엇인가요?
RQt는 플러그인 형태로 다양한 도구와 인터페이스를 구현하는 GUI 프레임워크이며 다양한 목적의 GUI tool을 모아둔 toolbox이다.
현재 ros2 Foxy 기준으로 아래와 같이 총 16개 (default 14개 + Robot Tools 2개)를 설치 할 수 있다.
RQt 실행해보기
RQt 실행 방법은 총 3가지이다.
1. RQt 실행 후 메뉴에서 플러그인 실행
$ rqt
Bash
복사
위의 명령어를 통해 RQt를 실행한 뒤 ‘Plugins’ 메뉴에서 원하는 플러그인을 선택하면 해당 플러그가 화면에 표시된다. 여러 플러그인들을 불러 올 수 있으며 마음대로 커스터마이징이 가능하다.
2. ros2 run 명령어로 실행
$ ros2 run rqt_msg rqt_msg
Bash
복사
위의 명령어를 통해 각 rqt 관련 패키지들의 노드들을 하나씩 실행시키는 방법이다. RQt 플러그인이 상당히 많아서 자주 쓰는 한두개의 플러그인을 사용할 때 이용한다.
3. 단축 명령어 이용하기
$ rqt_grqph
$ rqt_topic
Bash
복사
RQt 중요 플러그인 살펴보기
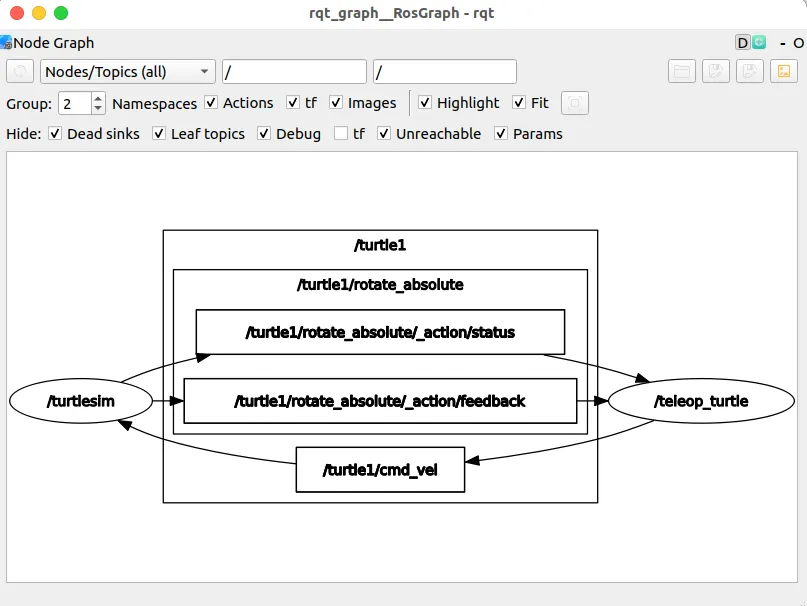
Node Graph
메뉴: [Plugin] -> [Introspection] -> [Node Graph]
현재 개발 환경에서 실행한 노드들의 관계를 그래프 형태로 표시하는 플러그인이다. 이 플러그인의 경우 메뉴에서 실행하기 보단 ‘rqt_graph’ 를 입력해 실행하는 것이 더 빠르다.
$ ros2 run turtlesim turtlesim_node
$ ros2 run turtlesim turtle_teleop_key
$ rqt_graph
Bash
복사
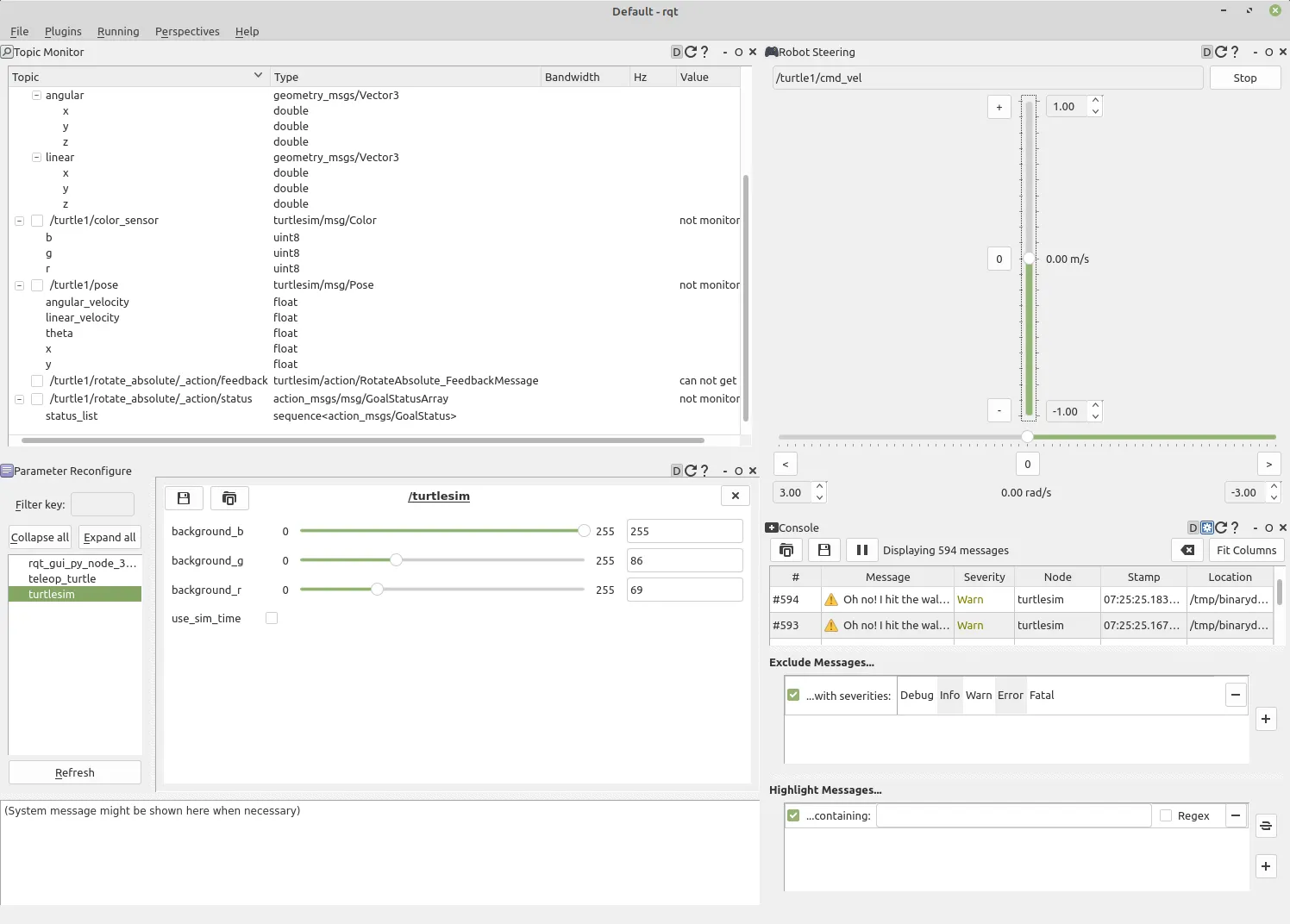
Topic Monitor
메뉴: [Plugin] -> [Topics] -> [Topic Monitor]
현재 개발 환경에서 실행한 노드가 사용하는 토픽 목록을 확인하고, 특정 토픽의 이름, 타입, 대역폭, 발행 주기, 값의 정보들을 확인하는 플러그인이다.
