

대표적인 자율주행 데이터
KITTI datasets
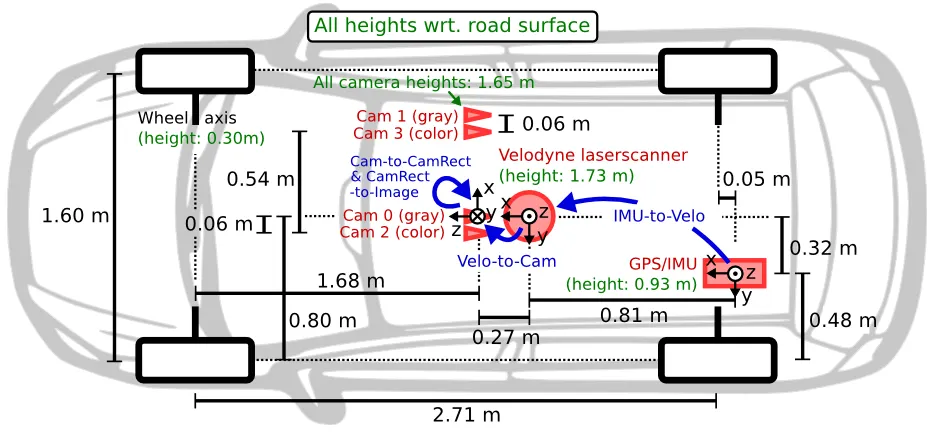
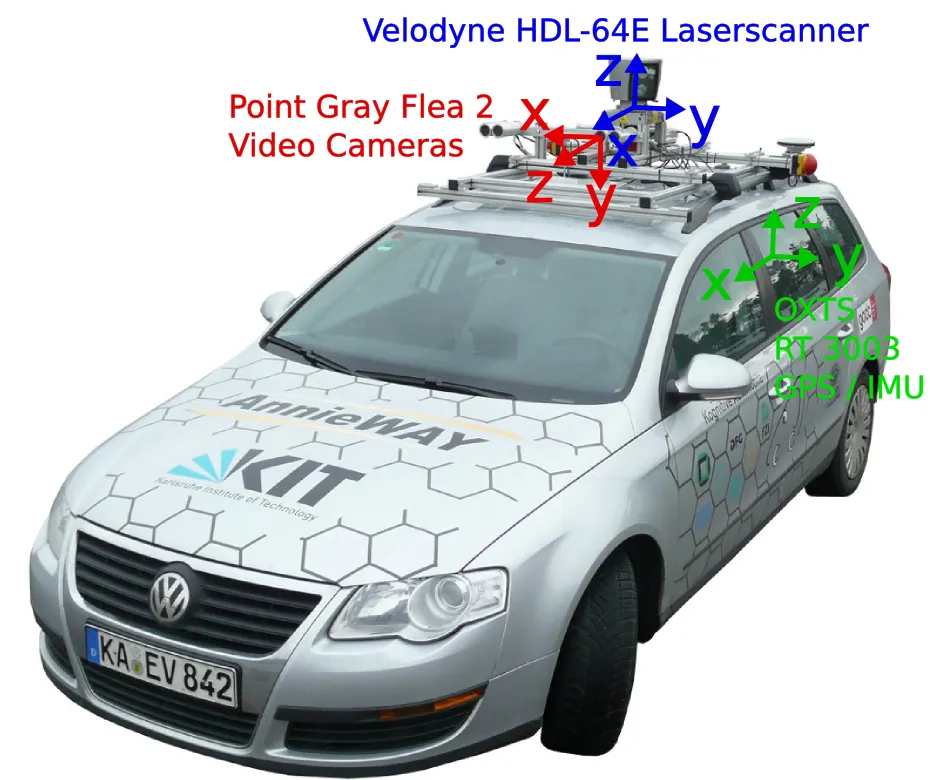
KIT(Karlsruhe institute of Technology)에서 발표한 자율주행 데이터셋이다. 2012.03 공개
카메라, 라이다, gps 등을 함께 사용하였다.
•
카메라 : 고해상도 RGB, Grayscale Stereo camera 2대를 이용한다. 이를 통해 RGB 영상 뿐 아니라 Depth 값을 제공한다.
•
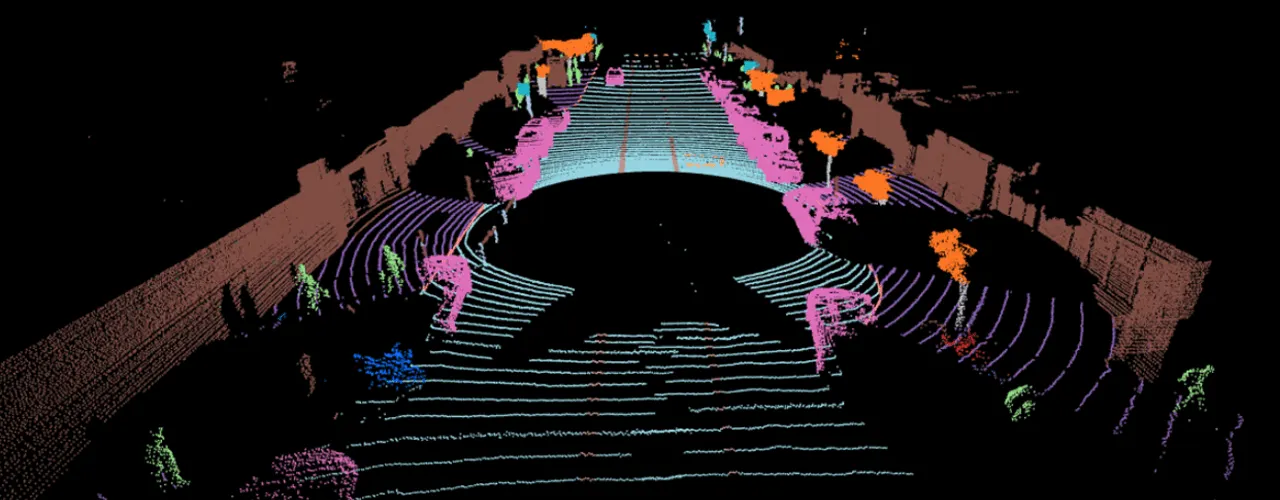
라이다 : Velodyne 레이저 64채널 스캐너이다.
•
GPS / IMU
→ Ground Truth를 제공한다!
이미지 당 최대 15대의 자동차와 30명의 보행자를 가진다
•
독일 Karlsruhe의 도심, 시골지역, 고속도로에서 수집된 데이터이다.
•
자율주행 시스템 개발에 가장 많이 사용되는 데이터셋이다.

BDD 100K datasets
UC Berkeley 인공지능 연구 실험실(BAIR)에서 공개한 운전 데이터베이스. 2018.05 공개
영상 중심의 데이터
•
40초의 비디오 시퀀스로 이루어져 있다.
•
720 픽셀 해상도를 가지며, 초당 30프레임의 고화질의 100,000개 비디오 시퀀스로 구성된다.
거친 주행 환경 구현, GPS/IMU 데이터 및 타임 스탬프 포함
•
비, 안개, 흐린 날씨 및 맑은 날씨와 같은 다양한 날씨 조건에서의 데이터를 기록하였다.
•
낮 뿐만 아니라 밤 환경에서의 데이터도 수집되었다.
•
버스,신호등,사람,자전거 등등의 객체의 2D Bounding Box 정보도 포함한다.
→ 차선 인식, 객체 인식, 객체 추적, 센서 퓨전 등의 분야에서 활용된다.



Google Waymo datasets
Google waymo에서 개발한 자율주행 데이터셋이다. 2019.08 공개
25개 도시에서 1000만 마일의 거리를 운행한 주행 데이터
•
Waymo 자율주행 차량이 약 1000개의 주행 구간에서 지역별, 시간별, 날씨별 데이터를 수집하여 제공한다.
•
각 구간은 20초의 연속 주행 데이터를 담고 있다.
다양한 센서 데이터 제공
•
라이다 : 중거리 라이더 1개, 단거리 라이다 4개
•
카메라 : 5대의 카메라(전면 및 측면)
•
동기화된 라이다/카메라 데이터
•
카메라 투영된 라이다
•
센서 캘리브레이션 값과 차량의 pose 값



nuScenes datasets
현대자동차와 Aptiv의 합작법인 motional이 공개한 멀티모달 데이터셋이다. 2019.03 공개
실제 자율 주행 차량의 센서 데이터를 수집함
•
360도 시야 카메라 6대, 레이더 5대, 32채널 라이다 1대 등 완전 자율형 차량 센서 포함
데이터 특징
•
총 1000개의 scene을 가진다.
•
각 scene의 길이는 20초
•
23개 클래스에 대한 3d Bounding box를 포함한다.
→ CVPR 2020에서 5대 자율주행 데이터셋으로 선정!
KODAS datasets
대한민국 국토부 공간연구원에서 수집하여 제공하는 데이터셋 2020.06 공개
국내의 도심 및 고속도로 환경에서 제작
다양한 센서 데이터 사용
•
전/후방, 좌/우측 영상 데이터, 라이다 데이터, 레이더 데이터 포함
•
데이터 뷰어를 통해 라이다, 카메라, 오브젝트 데이터를 확인 할 수 있다.
→ 일반적인 목적으로는 공개되어 있지 않다.


KITTI-360 datasets
73.7km의 주행 거리에서 320k 이상의 이미지와 100k 레이저 스캔에 해당하는 독일 Karlsruhe의 여러 교외 지역을 기록한 데이터셋 2020.10 공개
라이다 데이터는 포인트와 라벨이 동시 제공된다.
•
라이다의 포인트 데이터로 분류를 진행하는 딥러닝 네트워크 개발 가능
•
딥러닝 분야(객체 인식 등등)에서 많이 사용 가능
→ 처리시간이 오래 걸린다.


Cirrus datasets
Volvo에서 제작한 데이터셋 2021.02 공개
다양한 센서 사용
•
전방 카메라 : 1920 650 해상도의 RGB 카메라 데이터
•
좌/우측 라이다 : 250m의 감지 범위를 가지는 1550nm 장거리 라이다
◦
Luminar사의 장거리 라이다 센서를 사용하여 감지 범위가 매우 뛰어나다
•
3축 GPS / IMU 데이터
→ 라이다 데이타 및 카메라 데이터에 대한 8개 클래스의 라벨을 제공한다. (Vehicle, Large Vehicle, Pedesrian, Bicycle, Animal, Wheeled Pedestrian, Motocycle, Trailer)
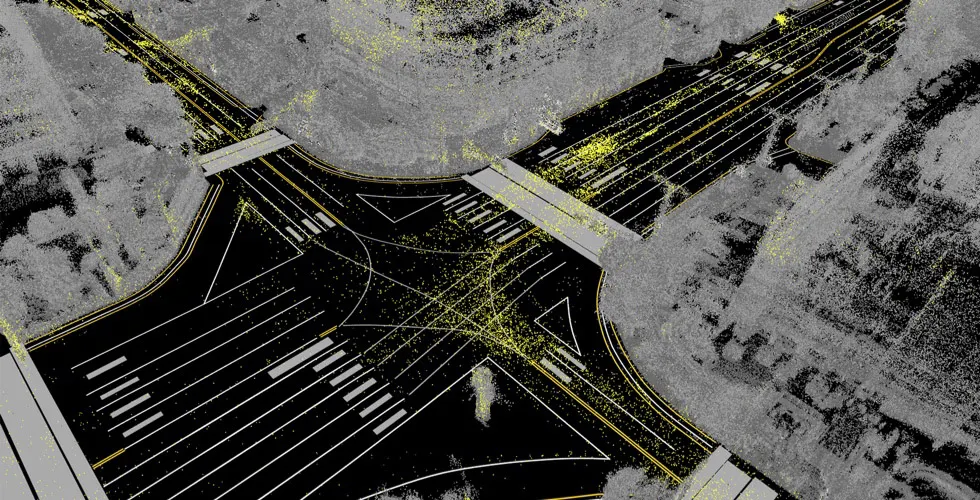
Naver Labs datasets
네이버랩스에서 공개한 HD map / Localization 데이터셋 2021.05 공개
•
서울 상암, 판교, 마곡, 여의도 등에서 캡쳐한 데이터 제공
다양한 형태의 데이터 제공
•
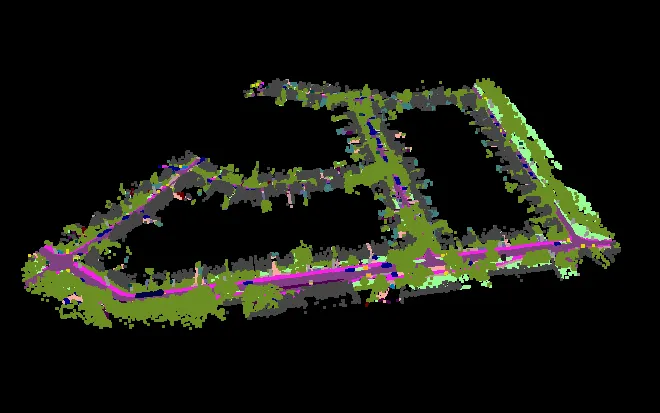
Road Layout data : 항공사진에서 추출한 노면의 3D 데이터
•
Visual Feature data : MMS 카메라 영상 데이터와 라이다로부터 얻은 3차원 기하 정보를 결합해 만들어지는 맵 데이터
→ 스캔한 주변 도로 환경을 나타내는 Lidar Feature Data도 존재하지만 법무 이슈로 미공개

Reference
아래 강연을 참조하여 제작하였습니다.

