

Epipolar Geometry 과정
목표 : 첫 번째 이미지의 점에 해당하는 두 번째 이미지의 평면에 존재하는 점 를 찾기
주어진 것 : 첫 번째 이미지의 평면에 존재하는 점
•
Image pairs의 기하학적인 관계를 표현하는 방법이다.
•
두 이미지 plane에 각각 같은 지점을 가리키는 점을 찾는 과정을 말한다.
•
straight-line preserving (Uncalibrated) camera를 가정하며,
찾는 공간이 2D (whole Image)에서 1D (Line)으로 줄어든다.
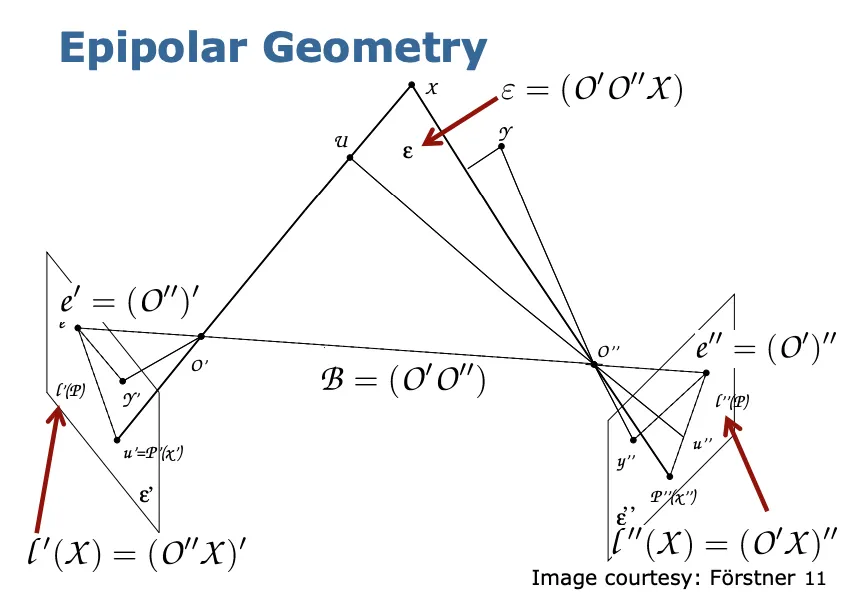
Epipolar Geometry를 구성하는 중요 요소들
1.
Epipolar axis
2개의 카메라의 projection center를 잇는 직선을 의미합니다.
2.
Epipolar plane
2개의 projection center와 point , 총 3개의 점으로 이루어지는 평면을 의미합니다.
3.
Epipoles
각각의 카메라의 Projection center가 다른 이미지 평면으로 투영될 때 생기는 점을 의미합니다.
epipole들은 아래 조건을 만족합니다.
4.
Epipolar lines
각각의 직선 , 가 다른 이미지 평면으로 투영될 때 생기는 직선을 의미합니다.
epipole과 epipolar line은 아래 조건을 만족합니다.
1.
Epipolar plane 과 2번째 이미지 평면 이 접하는 곳은 Epipolar lines 을 형성하고,
에 대응되는 점 은 위에 존재하게 됩니다. 찾는 공간을 2D에서 1D로 줄인 셈이 됩니다.
중요 요소들 구하는 방법
Projection matrix와 Fundamental matrix를 이용해 구할 것이다.
Epipolar axis
epipolar axis의 방향은 projection centers를 통해 바로 구해질 수 있다.
단, 방향만 알 수가 있다, 길이는 알 수가 없다!
Epipolar Lines
epipolar line에 있는 이미지 포인트 에 대하여, 아래 식을 만족한다.
앞서 다룬 coplanarity constraint 조건을 활용해보면,
이미지 포인트 에 대해서도, 똑같이 적용해보면,
coplanarity constraint 조건 을 이용해보면, 아래의 직선을 구할수 있다 (1D space)
Epipoles
다른 이미지의 projection center를 현재 이미지 평면에 project시킨 것을 epipole 이라고 한다.
위에서 정의한 epipole의 정의를 식으로 표현하면 아래와 같다.
epipole들은 각 epipoar line위에 있기 때문에 아래 식 또한 만족한다.
앞서 제시한 fundamental matrix 를 이용하여 정의된 epipolar line을 결합시키면, 아래의 식을 만들 수 있다.
이 zero-vector가 아니기 때문에, 아래 식을 만족해야만 하고
위 식을 다시 정리하면,
위 꼴을 통해 각 행렬의 null space를 정의할 수 있게 된다.
식에서 알 수 있듯이, 각 epipole들은 를 Eigendecomposition하여 얻는 eigenvalue 중 0에 해당하는 eigenvector임을 알 수 있다.
이러한 분해를 통해 epipoles를 구할 수 있다.
