
Inertial Navigation의 기본적인 내용과, Error Characteristic을 간단히 정리한다.
위 자료를 참고하여 제작하였다. 더 자세히 살펴보고 싶은 분들은 직접 읽어보기를 권장한다.
IMU sensor의 reference frame
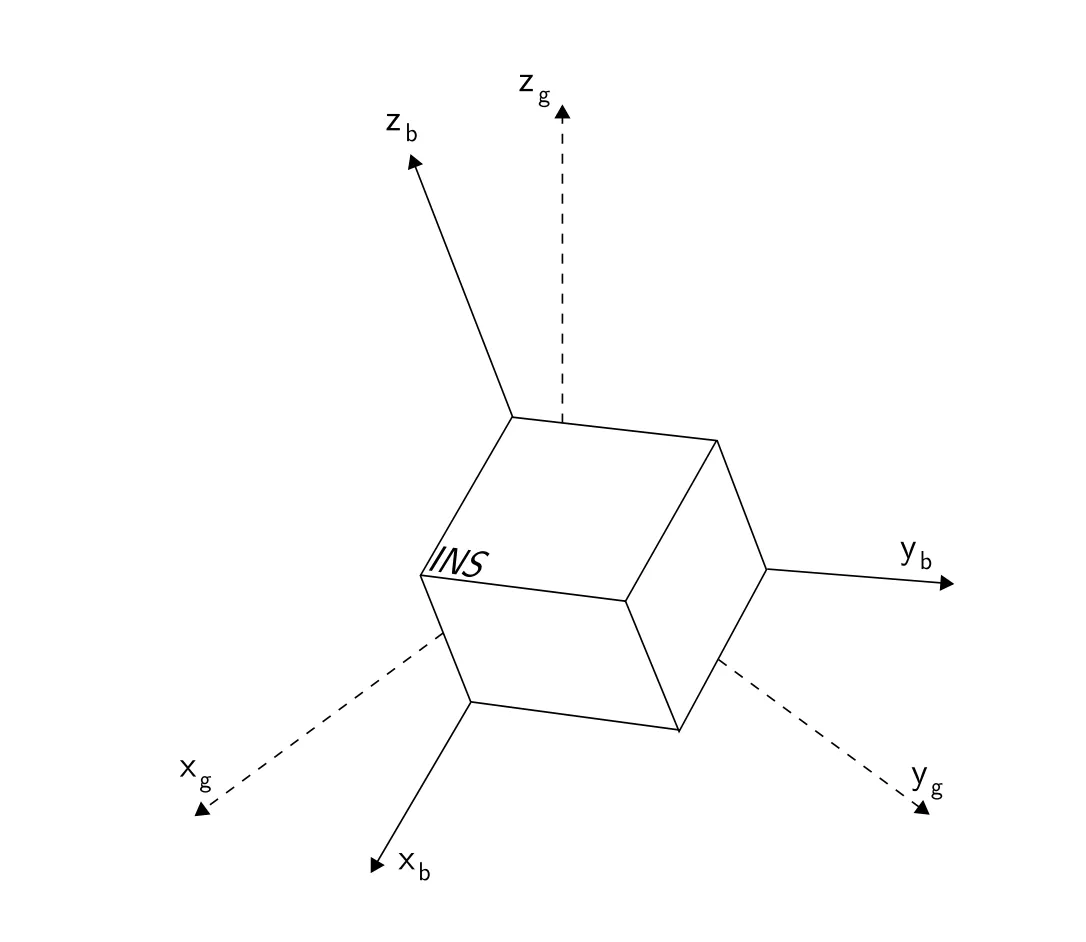
body frame과 global frame 2가지로 구분하여 다룬다.
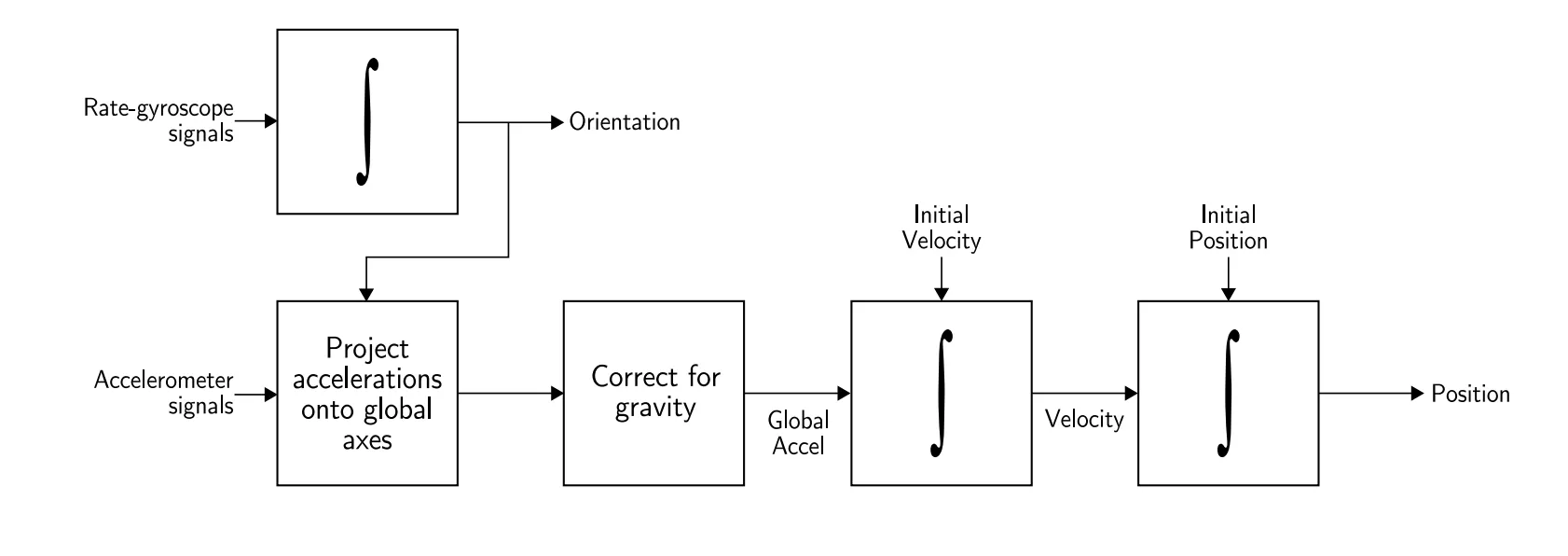
Strap-down Systems
이 시스템 상에서, inertial sensor들은 디바이스에 rigidly하게 연결되어 있기 때문에,
Output quantities는 주로 body frame에서 측정된 값이 나타난다.
•
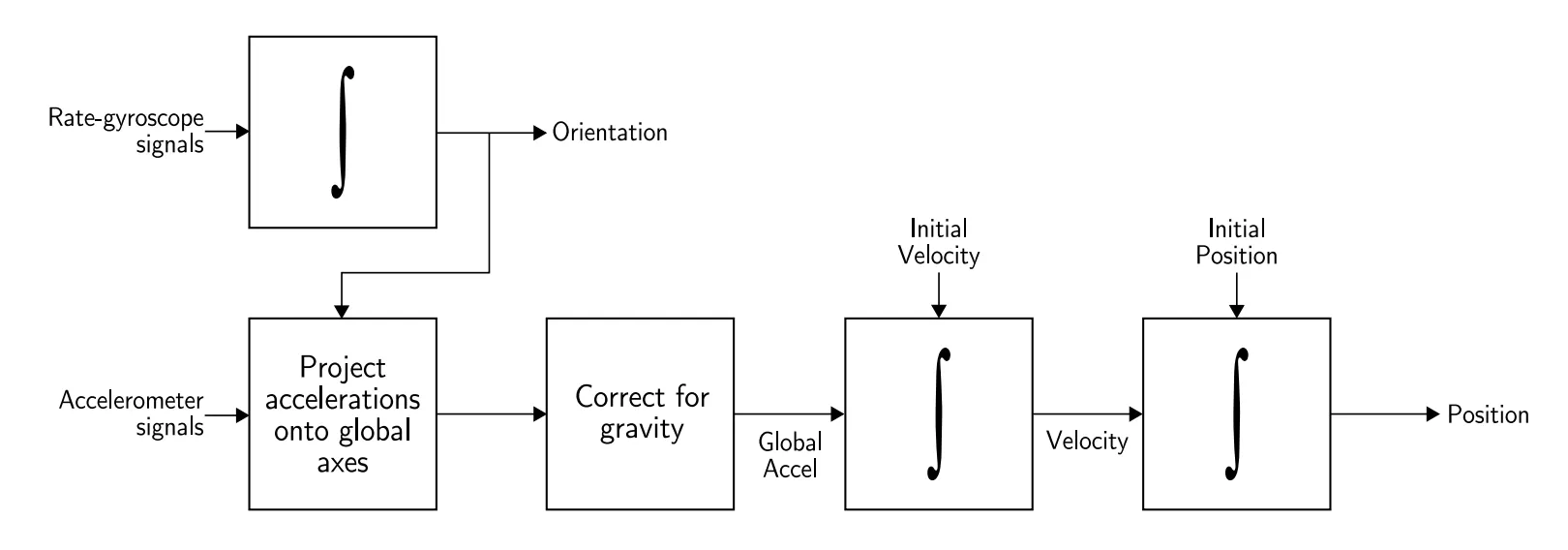
Orientation : rate-gyroscope에서 얻은 신호를 Integration 한다.
•
Position : 앞에서 구한 Orientation 정보를 이용하여 accelerometer에서 얻은 신호를
global coordinates로 변환하고 그것을 Double-Integration 한다.
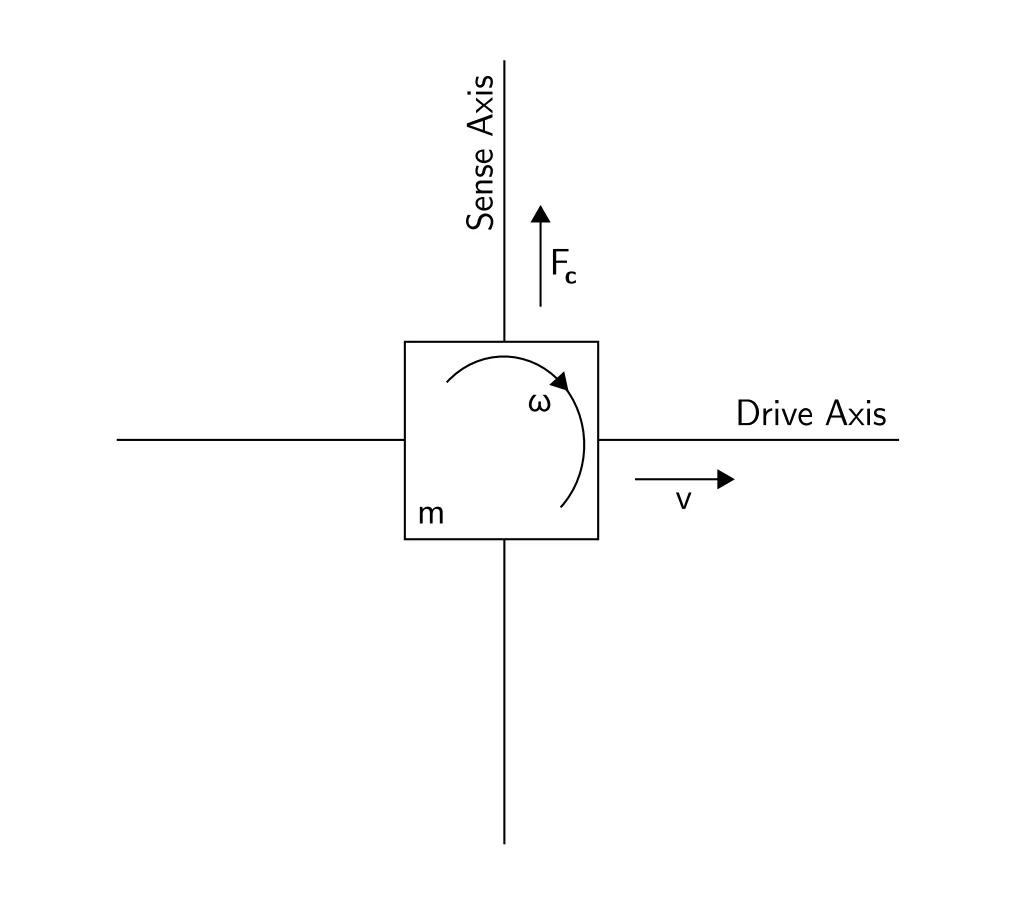
Gyroscopes
MEMS Gyroscopes의 경우, Coriolis effect 를 이용하여 angular-velocity를 구한다.
이 효과는 회전체의 표면 위에서 운동하는 물체에 대하여 운동 속도 방향에 수직으로 작용하는 가상의 힘이 생김을 나타내는데, 식으로 표현하면 아래와 같다.
MEMS Gyroscopes는 이러한 Coriolis effect 를 측정하기 위해 진동소자를 포함하고 있다.
drive axis를 따라 단일 물체가 진동하도록 되어있다.
Gyroscope가 회전할 때 Coriolis effect 에 의해 수직방향의 sense axis를 따라 2차 진동이 유도된다. angular velocity 는 이 2차 진동을 이용해 측정할 수 있다.
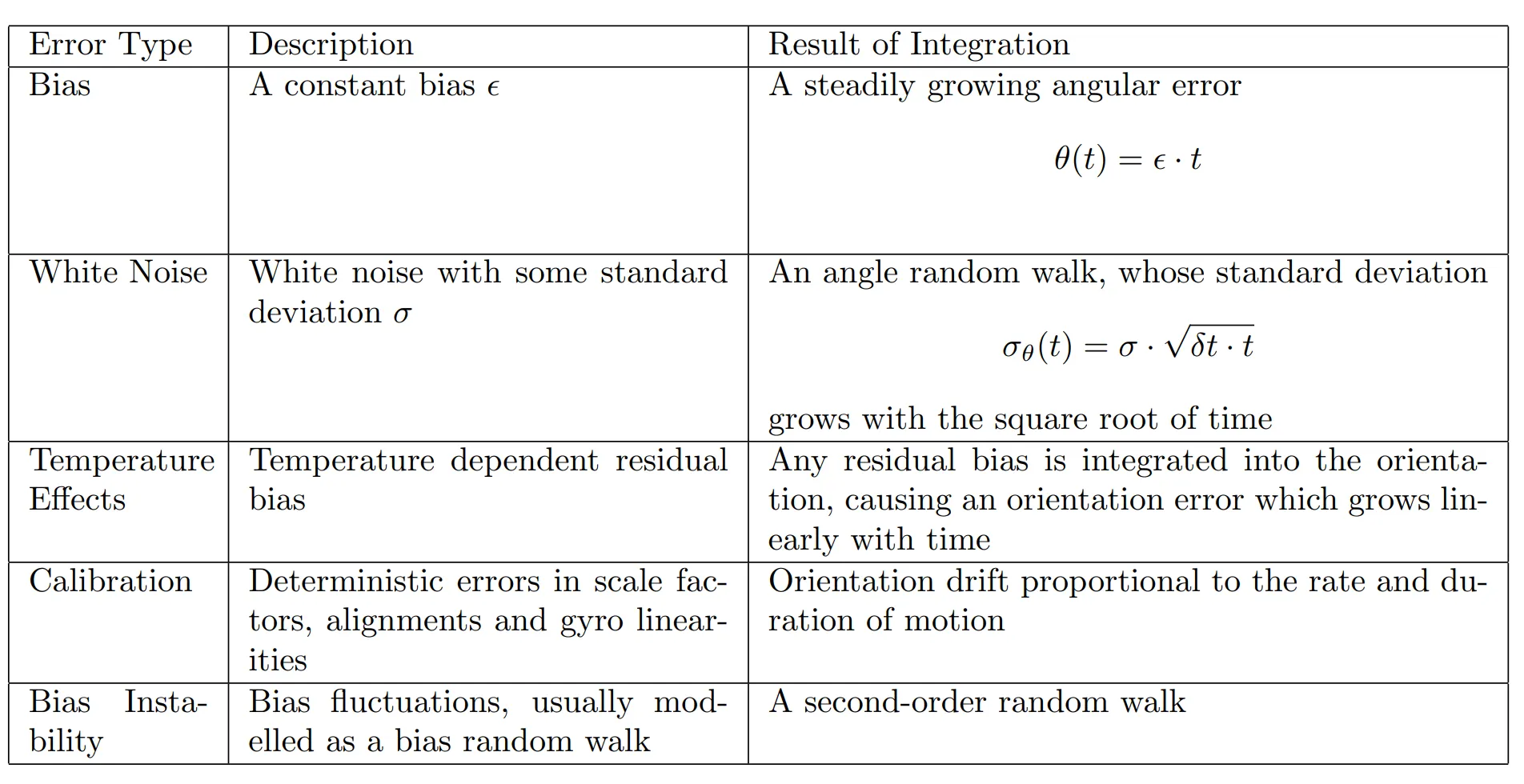
MEMS Gyro Error Characteristics
Accelerometers
2가지 방법으로 MEMS accelerometers를 다룬다
•
mechanical : 스프링과 연결된 mass를 이용하여 displacement를 측정한다.
•
Solid state : 입력 축을 따라 가속도가 가해지면 빔이 휘어집니다. 변형률에 비례하여
표면 음파의 주파수를 변화시키게 된다. 이러한 주파수 변화를 측정하여 가속도를 측정한다.
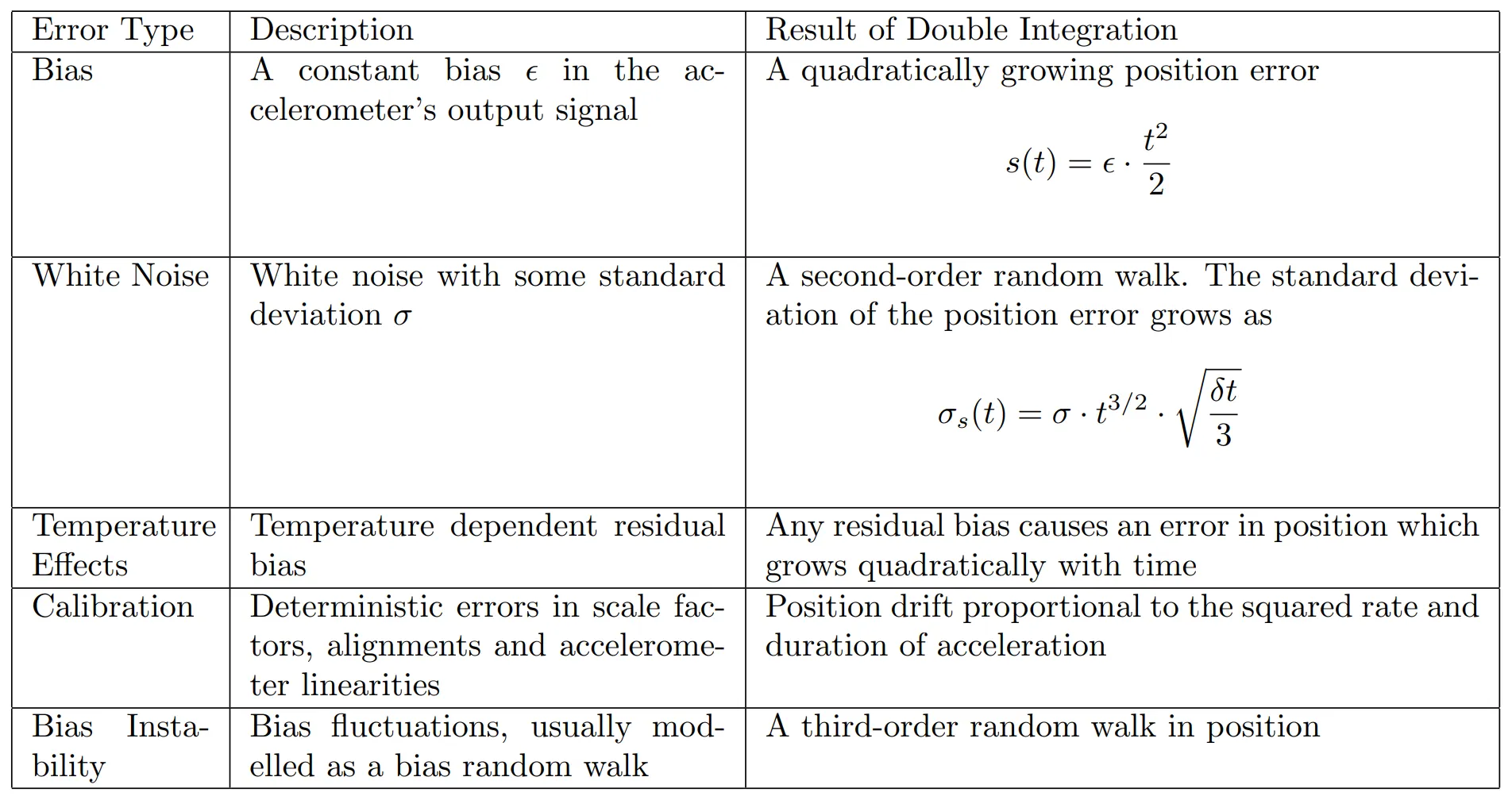
MEMS Accelerometers Error Characteristics
Strapdown Inertial Navigation
Tracking Orientation
: global frame 과 body frame 간의 변환을 나타내는 회전 행렬
: 연속적인 samples 사이 시간 간격
,
Tracking Position
: velocity
: displacement
Reducing drift in INS
1.
Sensor fusion → GPS, Magnetometers
2.
Domain Specific Assumptions
a.
IMU가 부착된 body의 움직임에 대해 가정하여 사용
NavShoe → 신발에 IMU를 부착하고, 발이 땅에 닿을 때에는 velocity를 0으로 가정
velocity drift가 주기적으로 교정된다.
b.
한정적인 환경에서만 알고리즘이 동작한다. 조금이라도 상황이 바뀌면 잘 작동하지 않는다.
